1. What’s the difference between T2216 and T200?
T2216 is a metal bearing, which is more stable and durable, but its thrust is slightly lower than that of T200. T200 is a non-metallic bearing, which cannot rotate in the air for a long time, but is relatively stable underwater.
2. Is there an integrated esc in T2216?
T2216 is the motor name, our T2216 model thruster has including the propeller, cover, motor, and integrated ESC, that’s a small solution.
3. What is the connection through the shell and what kind of connection do I need to use?
We have 2 solutions now. One is to use the cable penetrator, which cables across the middle of the penetrator, and then sealed with epoxy resin. This method is economical and small in size, but the disadvantage is it’s troublesome to disassemble. Another is via watertight connectors, which have a high cost, but it is really easy and simple.
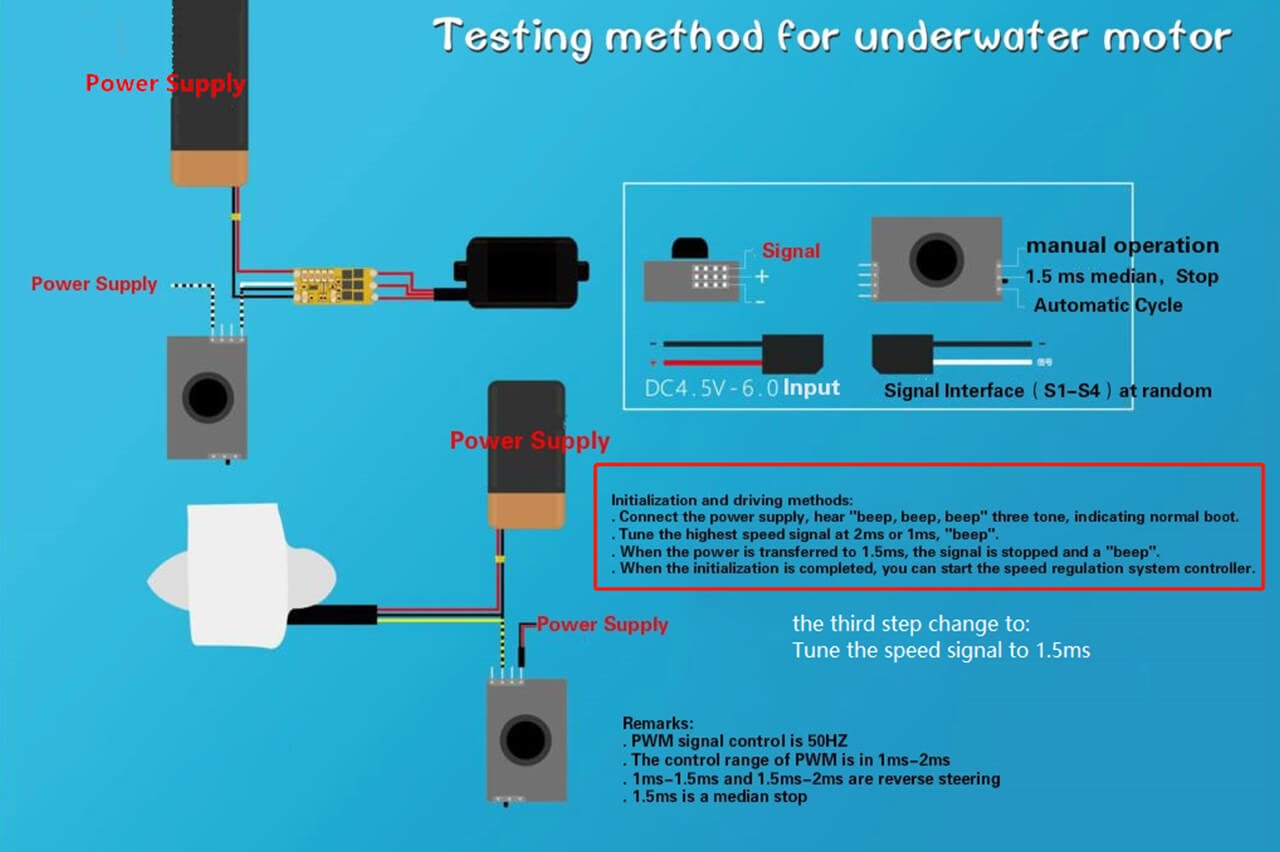
4. The model diagram of T2216 is available, but you can’t see it on the left. What is the axis? For horizontal axes. What does pulse width modulation input mean? Is the control signal separate from the power supply? Or the pulse of the power cord?
The PWM signal is sent to the ESC, while the power input to the esc24v is input, and the ESC provides the UVW three-phase power to the motor.
5. Can the disconnection and start of each thruster be controlled separately through the wet connection?
The open-source software ground control already has a similar function, which controls the rotation of each motor separately.